Bei der Berechnung von Zahnradgetrieben sollte man mit der grundsätzlichen Geometrie von Zahnrädern vertraut sein. Auch die Grundlagen von Zahnradgetrieben sind hilfreich.
Formelzeichen – Berechnung von Zahnradgetrieben
| Formelzeichen | Bezeichnung | Einheit |
| P | Leistung | kW, W, Nm/s |
| z | Anzahl der Zähne | – |
| i | Übersetzungsverhältnis | – |
| m | Modul | – |
| M | Drehmoment | Nm |
| Mb | Biegemoment | Nm |
| MV | Vergleichsmoment | Nm |
| d | Teilkreisdurchmesser | mm |
| Ft | Tangentialkraft / Umfangskraft | N |
| Fr | Radialkraft | N |
| σb zul | zulässige Biegespannung | N/mm² |
Formeln
Drehmoment
Tangentialkraft / Umfangskraft
Teilkreisdurchmesser
Übersetzung
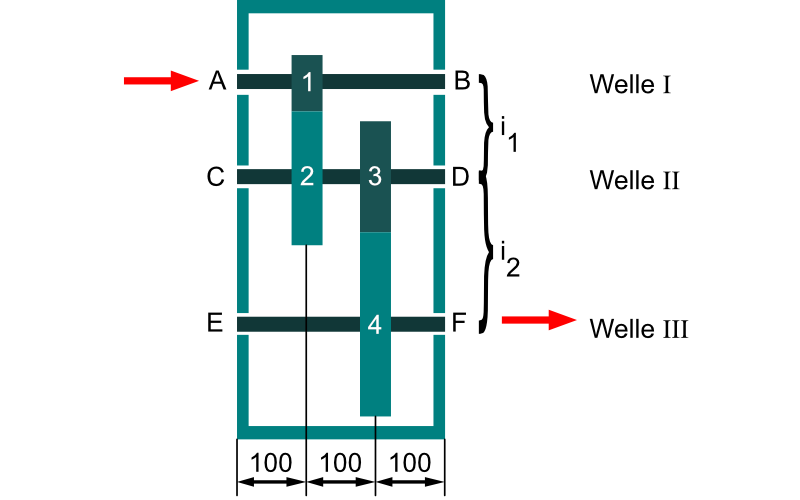
Beispiel 1 – zweistufiges Stirnradgetriebe
Dieses Beispiel wird auch im Böge Aufgabenbuch behandelt. Das zweistufige Stirnradgetriebe hat 4 geradverzahnte Zahnräder und wird mit einem Elektromotor angetrieben, der eine Ausgangsleistung von 4 kW bei 960 min-1 aufweist. Folgende Werte sind bekannt:
z1 = 19, z3 = 25, i1 = 3,2, i2 = 2,8, m1/2 = 6 mm, m3/4= 8 mm, Eingriffswinkel α = 20°
Gesucht sind folgende Werte:
- Drehmoment M1
- Teilkreisdurchmesser d1
- Zähnezahl z2
- Tangentialkraft FT1
- Radialkraft FR1
- Lagerkräfte FA und FB
- maximales Biegemoment MbI max
- Vergleichsmoment MV1
- erforderlicher Wellendurchmesser dI (σbzul = 50 N/mm²)
- Drehmoment MII
- Teilkreisdurchmesser d2, d3
- Zähnezahl z4, Teilkreisdurchmesser d4
- Tangentialkraft FT3, Radialkraft FR3
- Lagerkräfte FC und FD
- maximales Biegemoment MbII max
- Vergleichsmoment MVII
- Wellendurchmesser dII (σbzul = 50 N/mm²)
1 Drehmoment M1
Das Drehmoment können wir anhand der Leistung und der Umfangsgeschwindigkeit ermitteln.
[F 16-41]
zunächst stellen wir Gleichung nach P um
Für d setzen wir 2r ein, da das Drehmoment Kraft · Länge des Hebelarms ist und dieser ist bei zylinderförmigen Bauteilen der Radius.
Wir finden nun in der Gleichung die Formel für das Drehmoment M=F·r wieder und können es einsetzen. F und r fallen also raus und M wird eingesetzt.
und nochmal in schön.
Diese Gleichung können wir nun nach M umstellen.
Nun können wir einsetzen.
2 Teilkreisdurchmesser d1
Der Teilkreisdurchmesser ist das Produkt aus Zähnezahl und Modul
3 Zähnezahl z2
z2 können wir anhand von z1 und dem Übersetzungsverhältnis i1 ermitteln
Wir wählen nach [TB 1-16] den nächstliegenden Wert, um das Übersetzungsverhältnis so wenig wie möglich zu verfälschen. Wir beachten dabei auch die Grenzzähnezahl von 17 [F 21-16]. Liegen aber weit darüber.
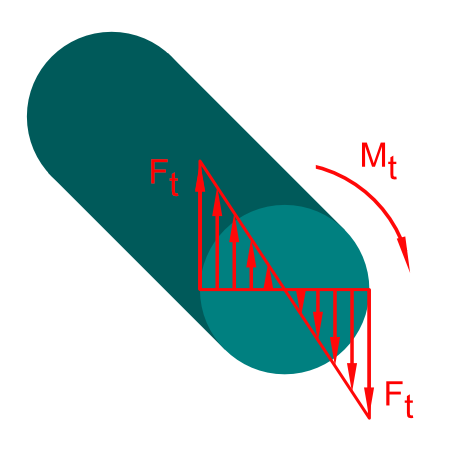
4 Tangentialkraft FT1
Die Tangentialkraft ist die Umfangskraft an der Welle also der Quotient aus Drehmoment und dem Radius.
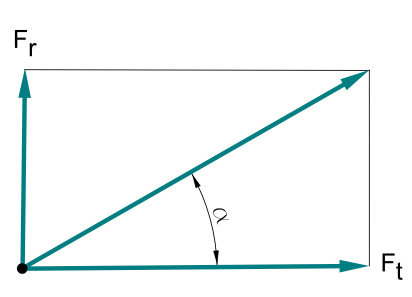
5 Radialkraft Fr1
Aufgrund der Zahnflankenform ergibt sich am Zahn ein Eingriffswinkel α von 20° durch diese „Schrägstellung“ wird die Tangentilakraft teilweise in eine Radialkraft aufgeteilt. Dies bedeutet aber auch, dass an der Welle ein zweiachsiger Spannungszustand herrscht.
6. Lagerkräfte FA und FB
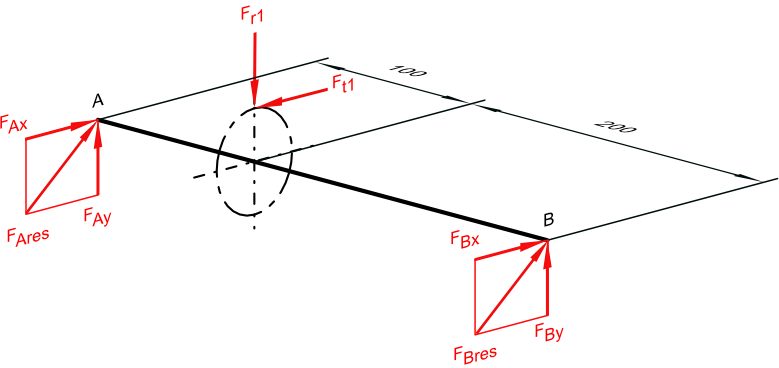
Wie bereits erwähnt herrscht nun an der Welle ein zweiachsiger Spannungszustand, um dies zu visualisieren, gibt es mehrere Möglichkeiten. Man kann sich einen zweidimensionalen Getriebeplan aufzeichnen und dann die Welle einmal vertikal und einmal horizontal freischneiden. Oder man zeichnet die Welle perspektivisch auf. Die Rechnung bleibt die Gleiche.
Dimetrische Darstellung
Getriebeplan
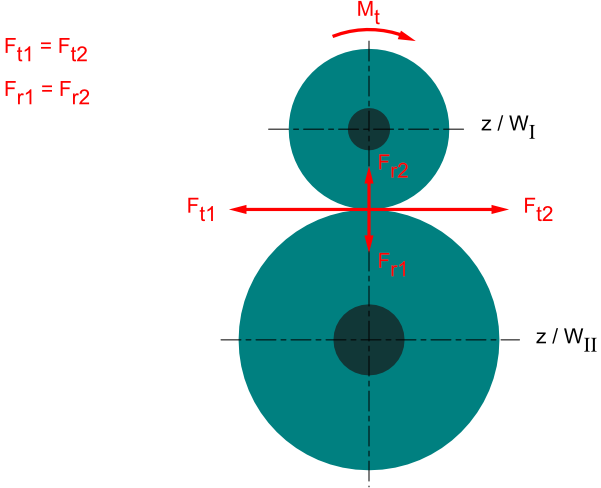
In welcher Richtung man das Drehmoment annimmt spielt keine Rolle. Nur die Indizes der Tangential- und Radialkräfte sollte dazu passen.
Freikörperbild Welle 1 vertikal
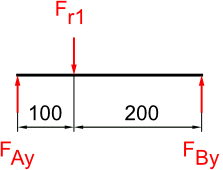
Nun können wir die Lagerkräfte berechnen. Wie das genau geht, habe ich im verlinkten Beitrag schon beschrieben.
Freikörperbild Welle 1 horizontal

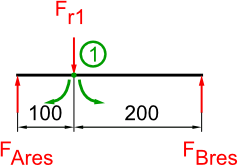
resultierende Kräfte
7. maximales Biegemoment Welle I
Nun können wir mit den resultierenden Lagerkräften das maximale Biegemoment ermitteln. Dafür betrachten wir nur die Tangentialkräfte und die Lagerkräfte. Die Radialkräfte berücksichtigen wir bei der Torsion.
8. Vergleichsmoment Welle I
Das Anstrengungsverhältnis α0 beträgt 0,7 nach [F 3-7]. Das Torsionsmoment entspricht dem Drehmoment aus Aufgabe 1.
9. Durchmesser Welle I
Hier ist die zulässige Spannung mit 50 N/mm² bereits gegeben. Normalerweise ist das nicht der Fall. Außerdem sieht die Aufgabe vor, dass die komplette Welle nur einen Durchmesser hat. Deshalb haben wir auch nur ein Biegemoment ermittelt.
nach d umgestellt. Mv für Mb
10. Drehmoment Welle II
Das Drehmoment können wir über die Übersetzung anhand von z1 und z2 ermitteln.
11. Teilkreisdurchmesser d2 und d3
12. Zähnezahl z4 und Durchmesser d4
Achtung! Der Durchmesser darf nicht noch einmal angepasst werden, da er das Produkt aus Modul und Zähnezahl ist, sonst hätten wir wieder eine ungerade Zähnezahl.
13. Tangentialkraft Ft3 und Radialkraft Fr3
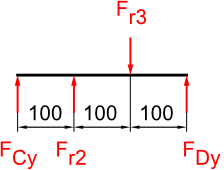
14. Lagerkräfte für Lager C und D
Dieses Mal hat unser Getriebeplan zwei Zahnradpaare zu berücksichtigen.
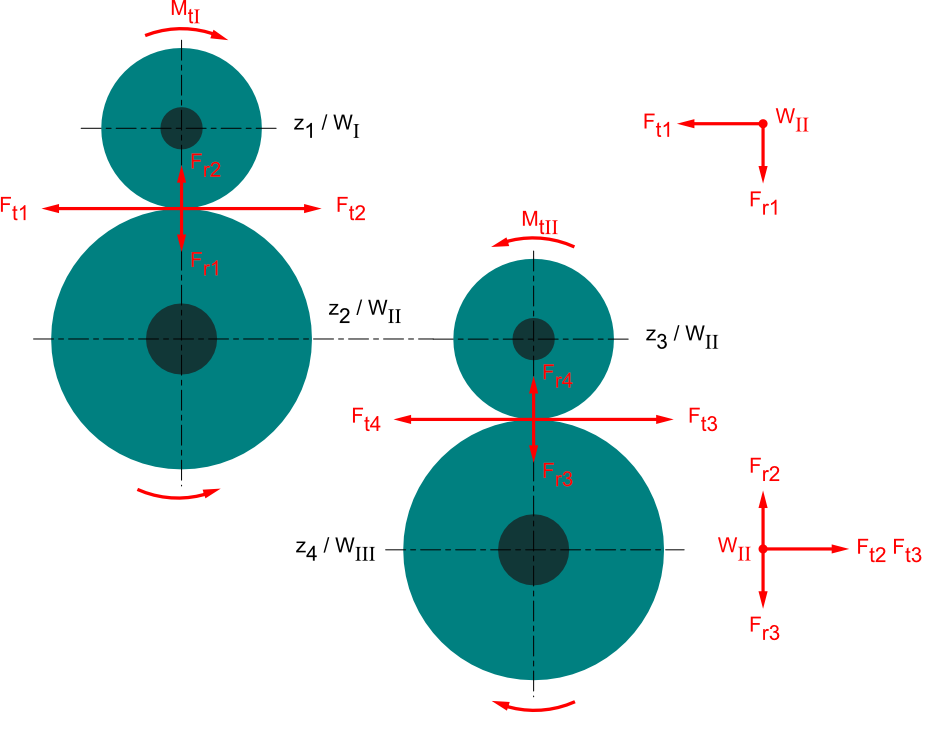
Auf der Welle II befinden sich Zahnrad 2 und 3. Das bedeutet wir beziehen alle Kräfte mit dem Index 2 und 3 in unsere Freikörperbilder mit ein.
Negatives Vorzeichen kann ignoriert werden.
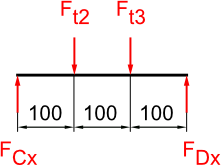
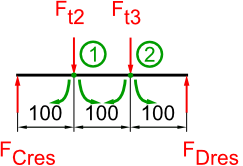
resultierende Kräfte
15. maximales Biegemoment Welle II
16. Vergleichsmoment Welle II
Das Anstrengungsverhältnis α0 beträgt 0,7 nach [F 3-7].
17. Durchmesser Welle II

Hallo Nils,
ich denke bei der Berechnung der Wälzlager ist dir ein Fehler unterlaufen.
Die Tangentialkraft muss bei der Lagerberechnung nicht beachtet werden. Diese wirkt ja nicht auf die Wellen und somit muss doch nur die Radialkraft berücksichtigt werden oder?
Gruß Piet
Hallo Piet,
du hattest in diesem Beitrag hier kommentiert. Welches Beispiel meinst du bezogen auf Wälzlager?
Viele Grüße
Nils
Hallo Nils,
vielen Dank für die schnelle Antwort. Ich meine in dem Beitrag bei Punkt 11 wird in der Abbildung gezeigt, dass die Tangentialkräfte von den Wälzlagern abgefangen werden, diese werden anschließend mit den Radialkräften in eine resultierende Kraft umgerechnet.
Die Wälzlager nehmen aber nur die Radialkräfte auf, die Tangentialkräfte werden über das eingreifende Zahnrad abgeleitet oder?
Vielen Dank im voraus.
Gruß Piet
Bist du im falschen Beitrag? Im Punkt 11 werden die Teilkreisdurchmesser angegeben.
Entschuldige mein Fehler, ich meine den Punkt 14.
Das sind keine Wälzlager, sondern Zahnräder. Die nehmen Tangentialkräfte auf, dass ist korrekt, so wie es dargestellt ist.
Hallo Nils,
Erstens, warum ist bei der Dimetrischen Darstellung die Radialkraft 1 auf das Zahnrad der Welle 1 gerichtet und bei dem Getriebeplan darunter auf das Zahnrad 2?
Zweitens, was würde sich an der Rechnung ändern, wenn die Wellen der Zahnräder nicht in einer Flucht liegen sonder bspw aus Platzgründen die Zwischenwelle höher liegt und es von der Vorderansicht sozusagen ein Dreieck bildet. Muss ich die Winkel zwischen den Zahnrädern dann einbeziehen oder kann ich das, da alles Radial ist weglassen und dein Beispiel wäre dann universal?
Vielen Dank
Hallo Fritz,
Kräfte können auf ihrer Wirkline darstellerisch verschoben werden, es spielt also vereinfacht gesehen keine Rolle ob die Kraft auf die Welle drückt. oder daran zieht.
Was deine zweite Frage angeht. Lässt man die Gewichtskräfte außen vor (was wir in dieser vereinfachten Rechnung hier tun), sollte das keine Rolle spielen. Man dreht einfach das Koordinatensystem und schon hat man die selbe Rechnung. Ansonsten hast du recht. Man müsste dann jede schräge Kraft in ihre X und Y Komponente zerlegen.
Ich hoffe es hilft dir weiter. Wichtig ist, im Zweifel, solltest du immer den Lehrer fragen, wie ihr die Fälle betrachten sollt! Die Beiträge hier bilden nur meinen Lernfortschritt ab und sind vielleicht nicht 1:1 auf jede Situation übertragbar.
Hallo Nils,
könntest du mir auch erklären wie ich die Axialkraft einer Zwischenwelle eines zweistufigen Stirnradgetriebes mit Schrägverzahnung berechne? (Schrägungsrichtung der Zahnräder ist so gewählt das die Axialkräfte z2 und z3 entgegengesetzt wirken.)
Eine detaillierte Erklärung würde das Format eines Kommentars sprengen. Es lässt sich grob festhalten, desto größer der Schrägungswinkel, desto größer auch die Axialkraft. Der Schrägungswinkel lässt sich mit der Formel cos(beta) = pn/pt ermitteln.
Hallo Nils,
vielen Dank für deinen Beitrag, hat mir sehr geholfen!
Ich wollte dich fragen, warum man hier keine Gewichtskraft (m*g) der Welle bzw. des Zahnrads berücksichtigt.
Vielen Dank!
Gruß Mata
Hallo Mata,
es freut mich, dass dir der Beitrag helfen konnte. Du hast natürlich vollkommen recht. Jedoch handelt es sich hier viel eher um ein Anwendungsbeispiel aus meiner Techniker Weiterbildung. Dabei geht es weniger darum zu ermitteln, welche Kräfte wie ins System kommen, sondern eher darum zu sehen, wie man mit diesen umgeht. Ansonsten müssten ja auch Zahnräder ermittelt werden. Die Festigkeitsberechnung der Zahnräder ist auch nicht Teil dieses Beitrags und somit kennen wir die Masse dieser ja auch gar nicht.