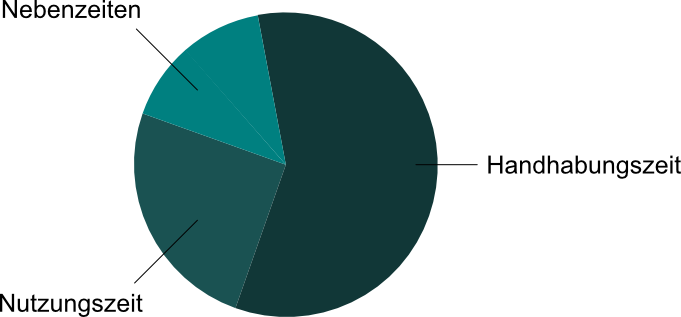
Die Handhabungstechnik wird immer wichtiger für die Industrie. Die Handhabung von Roh-, Hilfs- und Betriebsstoffen, sowie Werkzeugen, Bauteilen und Baugruppen macht einen Großteil der Arbeitszeit aus.
Robotik
Nach VDI 2860:
Industrieroboter sind universell einsetzbare Bewegungsautomaten mitmehreren Achsen, deren Bewegungen hinsichtlich Bewegungsfolge und Wegen bzw. Winkeln frei (d. h. ohne mechanischen bzw. menschlichen Eingriff) programmierbar und gegebenenfalls sensorgeführt sind. Sie sind mit Greifern, Werkzeugen oder anderen Fertigungsmitteln ausrüstbar und können Handhabungs- und/oder Fertigungsaufgaben ausführen.
| Robotorarten | |||||
| Stationäre Robotor | Mobile Robotor | ||||
| Serielle Kinematik | Parallele Kinematik | Radrobotor | Laufrobotor | Flugrobotor | Unterwasserrobotor |
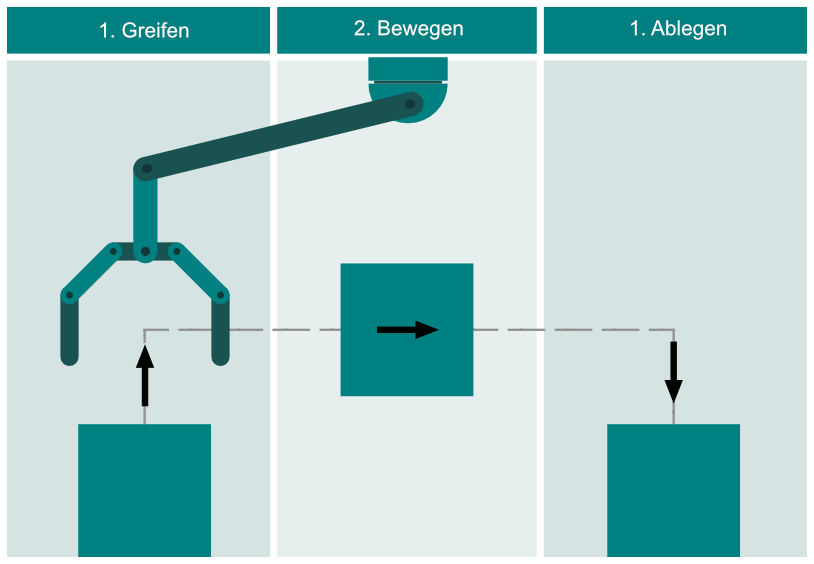
Handhabungsprozesse in der Handhabungstechnik
Handhabungsprozesse werden in 3 Phasen unterteilt.
Teilfunktionen des Handhabens
| Speichern | Mengen verändern | Bewegen | Sichern | Kontrollieren | |
| Elementarfunktion |
|
|
|
| |
| Zusammengesetzte Funktion |
|
|
|
|
|
| Realisierung |
|
|
|
|
|
Steuern und Regeln
Steuern
Beim Steuern beeinflusst ein Element durch einen (Input) ein anderes (Output). Ein gutes Beispiel ist eine Lampe mit Bewegungsmelder. Erfasst der Bewegungsmelder eine Bewegung gibt er einen Input an die Steuerung der Lampe (Output).
Regeln
Die Regelung ist ein Vorgang in einem System, bei dem die zu regelnde Größe fortlaufend gemessen und mit dem Sollwert verglichen wird. Bei Abweichungen wird dieser korrigiert bzw. angepasst. Ein Beispiel wäre die Temperaturregelung. Diese wird.
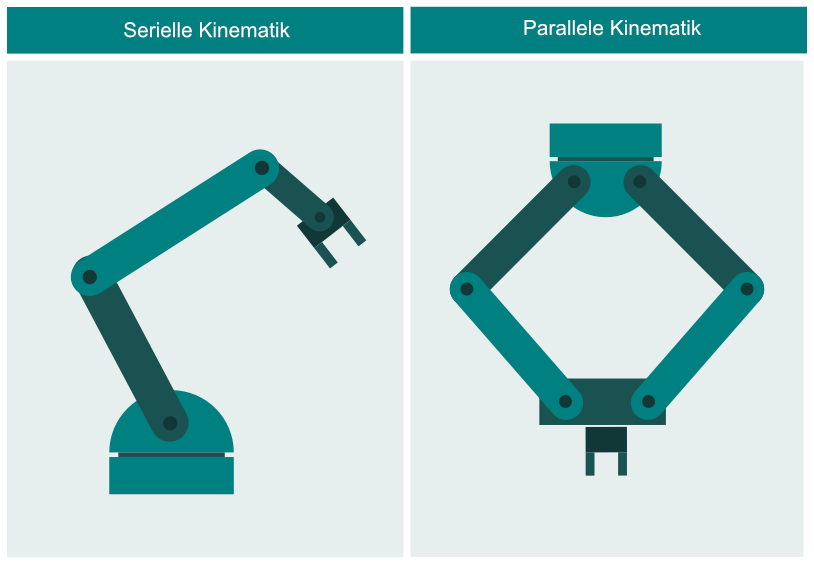
Parallele und serielle Kinematiken
Serielle Kinematik
Bei der seriellen Kinematik ist jedes Armteil an einer Stelle mit dem nächsten verbunden. Das letzte Armtteil ist wiederum mit dem Effektor verbunden. Die kinematische Kette ist offen.
Parallele Kinematik
Bei der parallelen Kinematik finden wir eine geschlossene kinematische Kette vor. Es gibt mehrere Verbindungen zum Sockel und zum Effektor und die Armteile sind untereinander verbunden.
Gelenktypen
- Rotatorische/Drehgelenke
- Translatorische/Lineare Gelenke
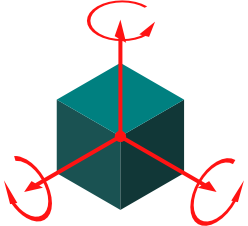
Freiheitsgrade
Ein frei im Raum beweglicher Körper hat 6 Freiheitsgrade. 3 rotatorische und 3 translatorische.
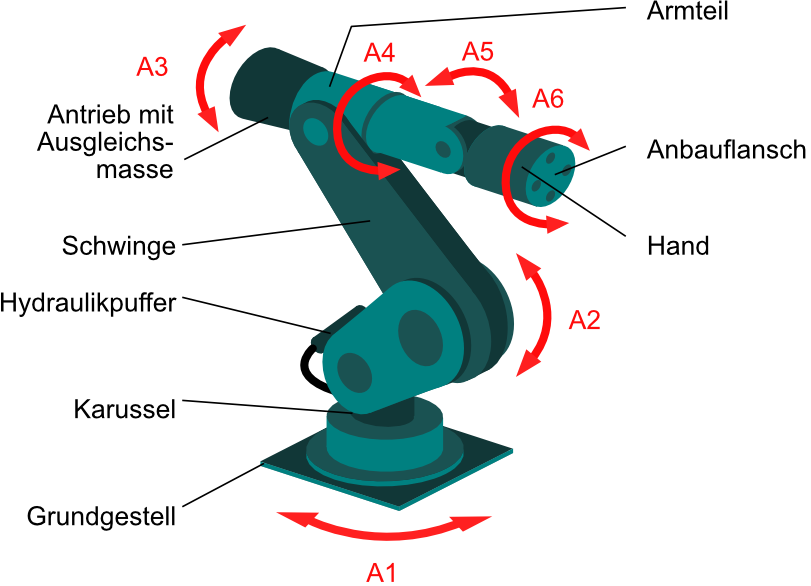
Achsenbezeichnungen
3 Hauptachsen (Grundachsen) A1 – A3, ermöglichen das Erreichen der gewünschten Position im Raum mit dem Effektor.
3 Handachsen (Nebenachsen) A4 – A 6, ermöglichen die Einstellung der gewünschten Orientierung der Hand; tragen nur wenig zu Positionsänderungen bei.
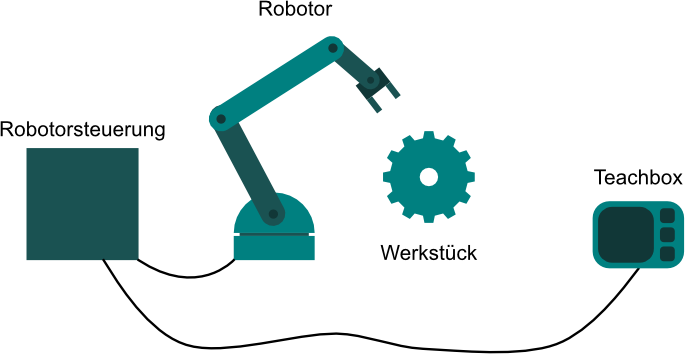
Robotorprogrammierung
ON-LINE
direkte Programmierung z.B. Tech-In-Verfahren.
Pros
- Anschauliche Programmierung, Kollisionen, Ungenauigkeiten und Störungen werden direkt erkannt
Cons
- Arbeitsplatz wird belegt
- komplexe Programme schwierig
OFF-LINE
indirekte Programmierung mit Programmierplatz. Wird häufig verwendet für Robotoprogramme, die Sensorsignale verwenden oder die CAD Daten enthalten.
Der Name ON-LINE ist nicht mit online zu verwechseln. Dies könnte fälschlicherweise genau das Gegenteil suggerieren.
Systemauslegung von Robotoren
Die Firma Schmalz stellt dafür einen anschauliches Ablaufschema zur Verfügung.

danke fande ich sehr hilfreich