Die Berechnung eines Riementriebs sollte grundsätzlich nach Herstellerangaben getätigt werden. Dennoch kann man die hier gezeigte Form allgemein anwenden. Diese stammt aus dem Buch Roloff Matek Maschinenelemente.

Formelzeichen
| Formelzeichen | Bezeichnung | Einheit |
| P | Leistung | kW, W, Nm/s |
| PNenn | Nennleistung der Keil- Keilrippenriemen | kW |
| n | Drehzahl | min-1, 1/min |
| d | Durchmesser der Riemenscheibe / Richtdurchmesser | mm |
| i | Übersetzungsverhältnis | – |
| e | Wellenabstand | mm |
| L | Riemenlänge | mm |
| b | Riemenbreite | mm |
| B | Scheibenkranzbreite | mm |
| β (griech. beta) | Umschlingungswinkel | ° |
| Ft | Umfangskraft | N |
| Fw0 | Wellenbelastung im Ruhezustand | N |
| KA | Anwendungsfaktor / Betriebsfaktor | – |
| ν (griech. nu) | Umfangsgeschwindigkeit / Riemengeschwindigkeit | m/s |
| T | Drehmoment | Nmm, Nm |
| t | Flachriemendicke | mm |
| h | Höhe | |
| z | Anzahl der Zähne (Synchronriemen) Anzahl der erforderlichen Riemen (Keilriemen) Rippenanzahl (Keilrippenriemen) | – |
| fB | Biegefrequenz | 1/s |
| k | Faktor zur Berücksichtigung des Riementyps | – |
| Üz | Übersetzungszuschlag | kW |
| c1 | Winkelfaktor zur Berücksichtigung des Umschlingungswinkel | – |
| c2 | Längenfaktor bei Keil- und Keilrippenriemen | – |
| ze | Anzahl eingreifender Zähne | – |
| p | Teilung Synchronriemenscheiben | mm |
Indizes / Suffixe
| g | große Riemenscheibe |
| k | kleine Riemenscheibe |
| ‚ | vorläufig angenommener / rechnerischer Wert |
| w | wirkend z.B. dw = Wirkdurchmesser |
| b | Bezug z.B. hb = Bezugshöhe |
Formeln – Berechnung eines Riementriebs
vorläufiger Wellenabstand (Flach- Keil- Keilrippenriemen)
vorläufiger Wellenabstand (Synchronriemen)
ausgeführter Wellenabstand
theoretische Riemenlänge
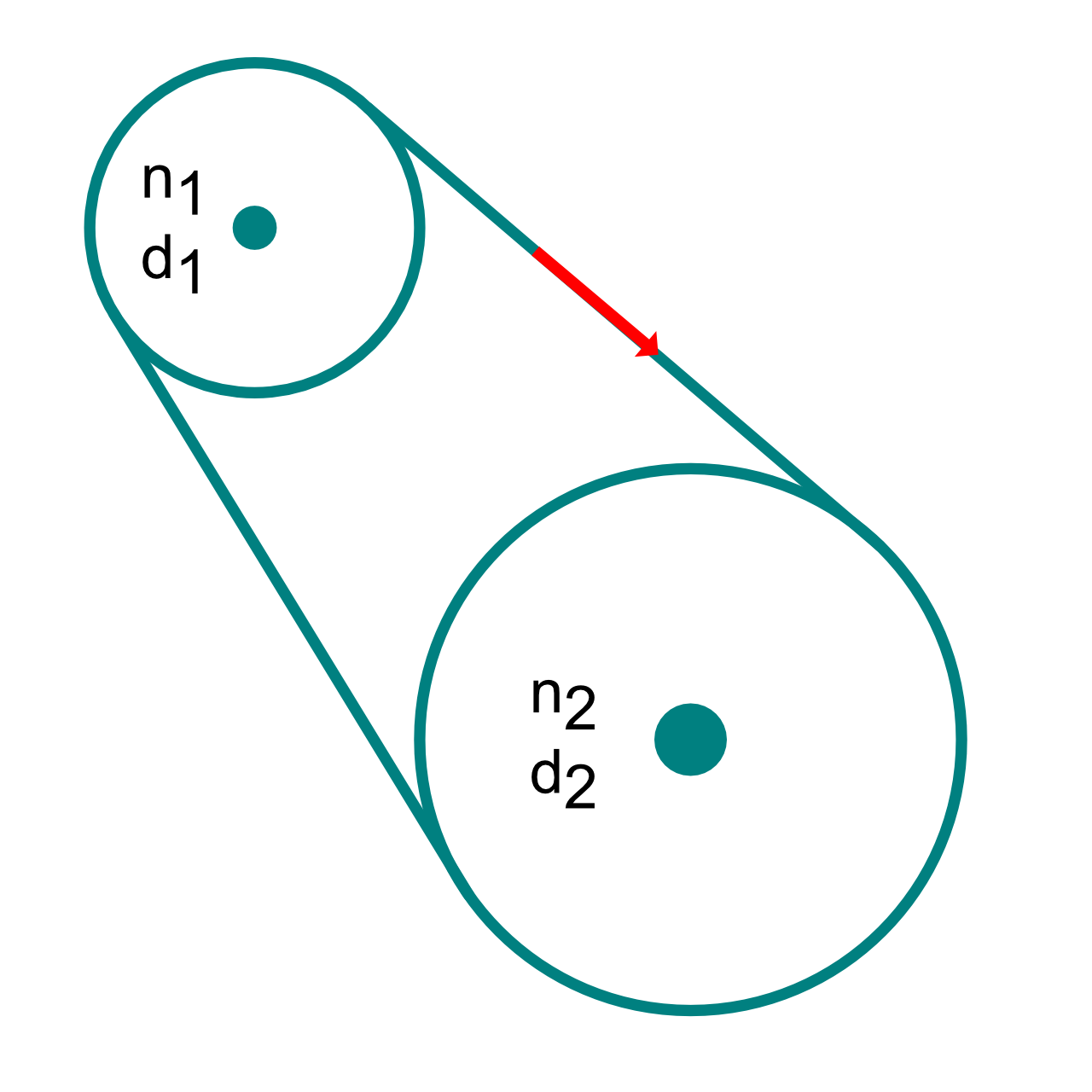
Umschlingungswinkel an der kleinen Scheibe (Flach- Keil- und Keilrippenriemen)
Umschlingungswinkel (Synchronriemen)
Umfangskraft
ungefähre Riemengeschwindigkeit
Riemengeschwindigkeit
| dw Flachriemen | |
| dw Keilriemen | |
| dw Keilrippenriemen | |
| dw Synchronriemen (Zahnriemen) |
Riemenbreite (Flachriemen)
Riemenbreite (Synchronriemen)
Anzahl Keil-, riemen, rippen
Biegefrequenz
Wellenbelastung im Ruhezustand (Flachriemen)
Riemenzugkraft (Synchronriemen)
Durchmesser kleine Riemenscheibe (Flach- Keil- Keilrippenriemen
Durchmesser (Synchronriemen)
Beispiel Flachriemen
Der Antrieb eines Förderbands soll durch einen Flachriemen verwirklicht werden. Der Kunde hat noch einen Motor vom Typ 180M-1500-18,5 mit einer Drehzahl von 1450 min-1 und einer Leistung von 18,5 kW [TB 16-21]. Das Transportband hat eine Drehzahl von ca. 800 min-1. Der Durchmesser der großen Riemenscheibe darf nicht mehr als 500 mm und der Wellenabstand nicht mehr als 800 mm betragen, da der Platz begrenzt ist. Das Transportband wird 8h am Tag in Betrieb sein, wird mit mittlerem Anlauf und unter stoßfreier Volllast betrieben.
1. Vorläufige Leistung P‘
Die vorläufige Leistung P‘ brauchen wir in diesem Fall nicht ermitteln, da wir die zur Verfügung stehenden Leistung des Motors kennen.
2. Riemenausführung / Riemenprofil wählen.
Die Betriebsbedingungen sind relativ unbekannt, deswegen wählen wir einen Riemen, der den Einfluss von Fett und Öl besser verträgt. Wir entscheiden und nach [TB 16-6] für einen 80-LT.
3. Synchronriemen?
Nein ein Flachriemen ist kein Synchronriemen. Synchronriemen sind Zahnriemen.
4. Scheibendurchmesser ermitteln
Nach [TB 16-7] ermitteln wir zunächst den kleinen Scheibendurchmesser. Da wir für diese Scheibe die Leistung und die Drehzahl kennen.
Der nächste Wert ist 0,015 bei einem Scheibendurchmesser von 180 mm.
Die große Riemenscheibe können wir über das Übersetzungsverhältnis ermitteln. Wir kennen sowohl die Eingangs-, als auch die Ausgangsdrehzahl.
Wir könnten jetzt nach [TB 1-16] den Normzahlen entsprechen den Durchmesser wählen. Für Flachriemen gibt es aber nach [TB 16-9] eine eigene Wertetabelle. Um näher am ursprünglichen Übersetzungsverhältnis bleiben zu können wählen wir den Durchmesser:
5. vorläufiger Wellenabstand
Der vorläufige Wellenabstand e‘ ist mit 800 mm gegeben. Wir überprüfen diese Angabe.
Der vorläufige Wellenabstand 800 mm liegt im gültigen Bereich.
6. Riemenlänge ermitteln und festlegen
Die theoretische Riemenlänge ermittelt sich wie folgt.
Da Flachriemen durch Konfektionierung in jeder Länge hergestellt werden können, nehmen wir die gerundete ermittelte Länge.
7. endgültigen Wellenabstand festlegen
8. Flachriemen?
Ja es handelt sich um einen Flachriemen.
9. Ermittlung der erforderlichen Riemenbreite
Für die Ermittlung der Riemenbreite müssen wir erst einmal den einzusetzenden Riementyp kennen. Dieser kann nach [TB 16-8] anhand des Umschlingungswinkels β und des Scheibendurchmessers d ermittelt werden.
Da üblicherweise die Antriebswelle immer an der kleinen Riemenscheibe sitzt, da das Drehmoment am Verbraucher erhöht werden soll, sollte der Umschlingungswinkel in der Regel kleiner als 180° betragen.
Riementyp 20 nach [TB 16-8] gewählt.
Nun müssen wir noch die Umfangskraft errechnen, die an der Scheibe wirken.
Wichtig! Ob wir hier den Anwendungsfaktor KA berücksichtigen, hängt davon ab, wie der Motor ausgewählt wurde. Wurde bei der Motorauswahl der Anwendungsfaktor bereits berücksichtigt, würden wir hier eine Überdimensionierung vornehmen, wenn wir diesen erneut einbeziehen. Wir gehen hier davon aus, dass dieser bereits berücksichtigt wurde, da ich die Vorgehensweise in dem verlinkten Beitrag bereits beschrieben habe.
Das Drehmoment kennen wir nicht. Wir kennen aber die Leistung. Die ungefähre Riemengeschwindigkeit können wir auch ermitteln.
Damit können wir die Riemenbreite ermitteln. lesen wir aus [TB 16-8] ab.
Nach [TB 16-9] wählen wir die Riemenbreite b = 71 mm und die dazugehörige Scheibenkranzbreite B = 80 mm.
10. Ergebnisse in Ordnung?
Wir gehen in die Prüfung.
11. Kontrolle
Für unseren Riementyp 80 LT 20 ermitteln wir in [TB 16-10] eine zulässige Riemengeschwindigkeit von 50 m/s. Da liegen wir deutlich drunter.
Der Hersteller gibt bei dem Riementyp 80 LT 20 bei günstigen Bedingungen 100 mögliche Biegewechsel pro Sekunde als möglichen Wert bei optimalen Bedingungen an. Wir liegen hier weit drunter.
Die zulässige Wellenbelastung aus [TB 16-21] für den Motor 180M-1500-18,5 beträgt in der Wellenmitte 2150 N am äußeren Ende aber nur 1950 N. Die Wellenbelastung ist also im kritischen Bereich.
Alternativer Weg
Um zu verhindern, dass die ganze Rechnung wiederholt werden muss, kann man die Prüfung am Anfang machen. Wir betrachten den Motor als gegeben und kennen somit schon am Anfang die zulässige Wellenbelastung. Wir dimensionieren in diesem Beispiel gegen das schwächere Wellenende mit einer zulässigen Belastung von 1950 N.
Für Ft setzen wir die Gleichung [F 16-41] ein.
und stellen diese nach d um.
nun müssen wir k wieder in die Gleichung einbauen.
Für Ft setzen wir die maximale Belastung Fw0 aus [TB 16-21] ein.
Beispiel Keilriemen
Ein Elektromotor treibt über einen Normalkeilriemen ein Förderband an. Gemäß Motorauswahl wurde ein 132M-7,5-1500 ausgewählt. Es soll ein Wellenabstand e von 450 mm angestrebt werden. Das Übersetzungsverhältnis beträgt i =2.
1. Vorläufige Leistung P‘
Die vorläufige Leistung P‘ brauchen wir in diesem Fall nicht ermitteln, da wir die zur Verfügung stehenden Leistung des Motors kennen.
2. Riemenausführung / Riemenprofil wählen.
Wir entscheiden uns nach [TB 16-11a] für einen A/13 Normalkeilriemen.
3. Synchronriemen?
Nein ein Keilriemen ist kein Synchronriemen. Synchronriemen sind Zahnriemen.
4. Scheibendurchmesser ermitteln
Für Ft setzen wir die Gleichung [F 16-41] ein.
und stellen diese nach d um.
nun müssen wir k wieder in die Gleichung einbauen.
Für Ft setzen wir die maximale Belastung Fw0 aus [TB 16-21] ein.
Die große Riemenscheibe können wir über das Übersetzungsverhältnis ermitteln.
5. vorläufiger Wellenabstand
Der vorläufige Wellenabstand e‘ ist mit 450 mm gegeben. Wir überprüfen diese Angabe.
Der vorläufige Wellenabstand 450mm liegt im gültigen Bereich.
6. Riemenlänge ermitteln und festlegen
Die theoretische Riemenlänge ermittelt sich wie folgt.
Da Keilriemen durch Konfektionierung in jeder Länge hergestellt werden können, nehmen wir die gerundete ermittelte Länge.
Die zulässige Riemenlänge nach [TB 16-12] beträgt für den Riemen A/13 zwischen 560…5300 mm. Wir liegen also im gültigen Bereich.
7. endgültigen Wellenabstand festlegen
8. Flachriemen?
Nein es handelt sich nicht um einen Flachriemen.
9. Ermittlung der erforderlichen Riemenzahl
Die erforderliche Anzahl an Keilriemen bezogen auf die Leistung inklusive der Zuschläge. Die Nennleistung der Keilriemen PN wir nach [TB 16-15] ermittelt. Der Übersetzungszuschlag nach [TB 16-16] und die Winkel- und Längenfaktoren c1 und c2 nach [TB 16-17].
Für den Zuschlag c1 müssen wir zunächst den Umschlingungswinkel β ausrechnen
Nun können wir c1 ablesen und einsetzen.
Wir brauchen also 4 Riemen.
10. Ergebnisse in Ordnung?
Wir haben die Kontrolle an den Anfang verlegt.
Beispiel Synchronriemen
In diesem Fall soll für die Berechnung des Riementriebs das Transportband mit einem Synchronriemen betrieben werden. Der Elektromotor 112M-4-1500 wurde bereits ausgewählt. Der Wellenabstand soll mit 200 mm geplant werden. Das angestrebte Übersetzungsverhältnis ist 2. Der Bauraum ist so gering wie möglich zu halten.
1. Vorläufige Leistung P‘
Die vorläufige Leistung P‘ brauchen wir in diesem Fall nicht ermitteln, da wir die zur Verfügung stehenden Leistung des Motors kennen.
2. Riemenausführung / Riemenprofil wählen.
Wir entscheiden uns nach [TB 16-18] für einen T10 Synchronriemen.
3. Synchronriemen?
Ja es handelt sich um einen. Synchronriemen sind Zahnriemen.
4. Scheiben Zähnezahl ermitteln
Da der Bauraum so gering wie möglich gehalten werden soll, wählen wir nach [TB 16-19b] die kleinstmögliche Zähnezahl aus.
Die Zähnezahl ergibt sich aus dem Übersetzungsverhältnis.
5. vorläufiger Wellenabstand
Für den Wellenabstand benötigen wir die Durchmesser.
Der vorläufige Wellenabstand e‘ ist mit 200 mm gegeben. Wir überprüfen diese Angabe.
Der vorläufige Wellenabstand 200 mm liegt im gültigen Bereich.
6. Riemenlänge ermitteln und festlegen
Die theoretische Riemenlänge ermittelt sich wie folgt.
Die Anzahl der Zähne pro Riemen kann aus [TB 16-19d] gewählt werden. Wir wählen 66 Zähne. Die Länge des Riemens ermittelt sich anhand der Zähnezahl und der Teilung.
Die zulässige Riemenlänge nach [TB 16-19b] beträgt für den Riemen T10 zwischen 260…4780 mm. Wir liegen also im gültigen Bereich.
7. endgültigen Wellenabstand festlegen
Da die Riemenlänge und die Zahnscheiben anhand der Zahnteilung fixiert sind, übernehmen wir den Wellenabstand so.
8. Flachriemen?
Nein es handelt sich nicht um einen Flachriemen.
9. Ermittlung der erforderlichen Riemenbreite
Die erforderliche Riemenbreite bezogen auf die Leistung und der eingreifenden Zähne. Die Nennleistung der Keilriemen Pspez wir nach [TB 16-20] ermittelt.
Für die Anzahl der eingreifenden Zähne ze müssen wir zunächst den Umschlingungswinkel βk ausrechnen.
Nun können wir ze ermitteln und einsetzen.
Pspez lesen wir aus [TB 16-20] ab.
Wir vergleichen den Wert mit [T 16-19c].
10. Ergebnisse in Ordnung?
Wir ermitteln die vorhandene Riemenzugkraft und vergleichen diese mit der zulässigen Zugkraft aus [TB 16-19c]. Bei unseren Riemenbreite beträgt diese 8800 N.
Die zulässige Riemenzugkraft wird nicht überschritten.
